ペンギンちゃん5体を魔改造、人が回す縄を1分間でいかに多く跳べるか、というこの競技。ペンギンちゃんの元の姿は下の写真にあるように、とても小さくてかわいらしいものです。手足を動かして、鳴きながらゆっくりと歩きます。
主なルールとして「5匹のペンギンちゃんが跳ぶこと」「それぞれのペンギンちゃんが足で床を蹴ること」「5匹のペンギンちゃんは繋がっていても構わない」「縄はどこを持って回しても構わない」「縄の色を変えても構わない」というものが設けられました。
この中で、最後の二つのルールを見れば、「あぁ、これはセンサーで縄を検知することを想定したものだな」とすぐに気付きます。
このホームページの「事業内容/金型・治工具・各種自動機械 設計製作」のところをご覧いただくとわかるのですが、当社は工場で運用する自動化設備を自社で設計製作しており、その中でセンサー類を使用することはよくあります。
今回このお題に対してリーダーが立てた目標は「1分間で100回!」
さすがに我々は他の2社のように自前でセンサーを用意することはできないので、早速センサーメーカーの担当者に来てもらって目標を前提に相談することにしました。
ネタバレしてはいけないということで、最終的に何に使うのかについてはとぼけて必死に誤魔化しながら「0.5秒くらいのサイクルで100~150mm程度離れたところを繰り返し通り過ぎる縄を検知したい」「反応速度は0.01秒レベル」「小型軽量でなければならない」などと謎の要求スペックを提示していたので、担当者さんは「???」だったかもしれませんが、とりあえず以下のことが判明。
必要なスペックを満たすには、最低でも3万円以上のセンサーが必要で、サイズ的にはある程度大きなものになる。
当初から我々は、人が回す縄をセンサーで検知する方式とする場合、スピードにバラツキが生じたり縄がたるんだり弾んだりするので、センサーを2カ所に取り付けて、それぞれのセンサーが縄を検知する時間差から縄の加速度を計算したうえで飛び上がるタイミングを制御しなければならないはずだ、と考えていました。
そうなると、センサーが1個3万円ですから、そもそも魔改造の夜共通の「予算は5万円以内」という基本ルールを守れないということになります。
たとえ価格交渉してコスト問題がクリアできたとしても、センサーとアンプで結構な容積と重量を占めてしまい装置自体が大型化することや、このような複雑な制御を行う装置をわずか1カ月半の期間で確実に作動するレベルにもっていくのは非常に難しい、ということが想定されます。
そこで早々に我々が下した決断は「敢えてセンサーは使わない、もし使うとしてもスタートのタイミングを合わせるもののみにする」というものでした。
この基本方針が決まったところで、「ではどんな機構でジャンプさせるのか」という課題に取り組んでいきます。
まず最初に出たアイディアは、
①クランクによってモーターの回転運動を上下運動に変えて、その勢いで跳ばす。
②ラックアンドピニオンという歯車機構を用いてモーターの回転を直線運動に変換。そのピニオンギヤの歯を一部無くすことで、バネを引っ張って一気に開放するという機構ができるので、その力で跳ばす。
というふたつ。
クランク方式の場合、ただ回すだけでは跳び上がるだけの勢いがつきません。まず通常のクランク機構で脚(支柱)にバネを仕込んで実験したところ、ある程度ジャンプさせることには成功しました。ただジャンプできる勢いで回すとペースが速すぎて縄跳びをさせるのが困難です。
よって、オフセットクランク機構やスロットクランク機構を活用して、縮まる動作は遅く、伸びる動作だけを加速させる工夫を加えて再試作を行いました。
小さいクランクで大きなストロークが得られる)
しかしこれでも動画の通り、重心が高くて不安定なうえ、跳ぶ勢いがまったく足りないので、結局この方式は不採用としました。
もうひとつの、欠歯を使ったラックアンドピニオンによる反復運動方式も並行して試作を進めました。これに関してはギヤにかなりの負荷が加わることが想定されたので、歯車部分の強度解析を行って歯が折れることがないか検証したうえで設計を進めます。
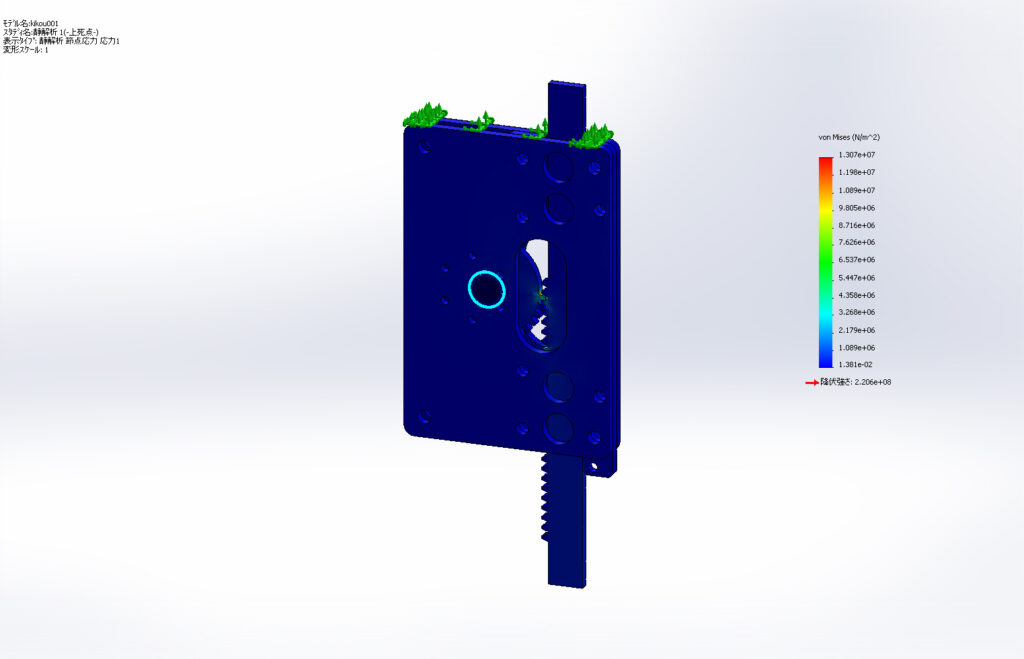
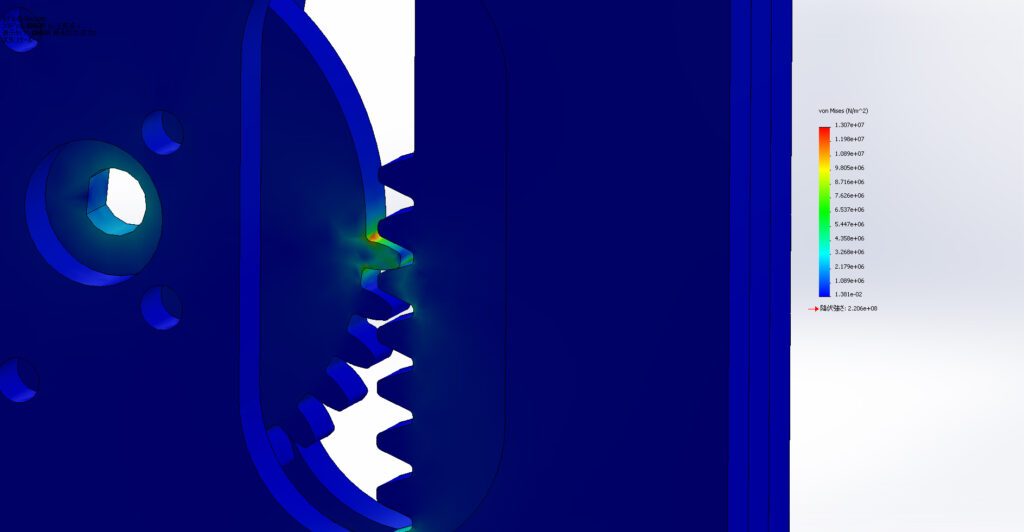
この機構では、バネの力・引っ張るストローク・ギヤの大きさ・欠歯の割合など、様々な要素が複雑に関係しています。最終的にはピニオンギヤを回転させるモーターのトルクに関わってくるのですが、機体をジャンプさせるだけの力を発生するにはかなりの回転トルクが必要です。ここで「モーターで直接そのトルクを発生させようとすると、モーターやバッテリーが大型化して重量アップとなってしまう」「小型のモーターを用いてギヤ比によってトルクをアップさせようとすると回転速度が落ちるのでジャンプの回数が稼げない」というジレンマに陥ることに。
また、クランク方式と同様に、どうしても高重心で不安定な機体となってしまうので、こちらも不採用としました。
実際に番組をご覧になった方はここでお気付きになったかもしれませんが、細かい部分は違えど、
①のスロットクランク機構一時停止型は「Rコー」さんが
②の欠歯を使ったラックアンドピニオン機構は「Dンソー」さんが
それぞれ本番の機体に採用された方式です。後にそれを知った時、この偶然の一致にはかなり驚きました。
我々は早々に不採用としましたが、どちらの会社も最終的にちゃんと跳ぶ機体に仕上げてきていたので、やはりそこは流石の技術力です。
以上のように、初期のアイディアはどちらも不採用となってしまいました。とにかく安定してある程度の高さまでジャンプできる機構を考え出さなければなりません。
思案する中で次に出てきたアイディアが圧縮バネを利用した以下の機構です。
これは今までの中では一番ポテンシャルが高そうです。なので早速、この上に載せるための「バネを縮めて一気に開放するメカ」を設計して、連続ジャンプができるようにしていきます。
モーターの力を使ってワイヤーを巻き取って、電磁クラッチで一気に開放する方式を取りました。

しかしテストを進めていくと、どうしてもワイヤーがたるむ瞬間が発生して、それが原因で絡まってしまったり、やはり重心が高いことによる不安定さが問題として浮かび上がってきました。
この時点で本番まで残り2週間。この期間で全ての問題をクリアして、相手に勝てるところまで持っていけるのかという不安が頭をよぎります。
よって、この方式はそのまま改良を続けるものの、平行してさらに安定して跳べる機構の開発にも着手することを決断し、ペンギンチームをさらにふたつのチームに分けて、それぞれ進めていくことにしました。
残された時間はわずかです。ジャンプをする動物や昆虫の脚を研究してみたり、みんなで色々と必死に考えました。
その中で新たに生み出されたのが、カエルの脚を反対向きに組み合わせたようなパンタグラフ形状の脚です。
自動車に積載されているパンタグラフジャッキを使ったことがある方ならばわかると思いますが、このパンタグラフ形状を活用すると、少ない力で重たい車を持ち上げることができます。具体的な理論はここでは割愛しますが、縦方向と横方向の力を増幅させたり減衰させたりすることができる、非常に便利な機構です。
すなわち、パンタグラフの左右の関節軸に引張ばねを取り付けると、縦方向の少ない力でそのバネを横に伸ばすことができます。逆にバネが縮むときには、横方向のバネの力が何倍もの縦方向の力になるので、強力なジャンプ力を生み出すことができるのです。
また、これまで検討した方式と違って縦方向の長い脚(支柱)も不要になるので、重心の低い安定した機体が製作可能になります。
すぐに1個試作して、機体の重量を想定した重りを取り付けて跳ばしてみました。
1個だけなのでまっすぐ上には跳んでいませんが、手ごたえありです。これを組み合わせれば、安定してジャンプできる機体が生み出せるのでは、という希望が持てた瞬間でした。
しかし、この脚をどのように配置するのか、また全ての脚を同時に縮めて同時に開放するにはどのような機構を使えばいいのか、これが問題です。
メンバーで色々と思案する中で、ふと気が付きました。当社は通常業務の中でオフィス家具の部品製造を数多く手がけていますが、そのオフィス家具の代表格と言ってもいい「オフィスチェア」、昔は4本脚のものもありましたが、今はみんな放射状に広がった5本脚をしています。これはなぜでしょうか?
それは、床がどんなに凸凹でも、5本脚だとそのうちの3本は必ず中心(重心)の外で床に設置するのでガタツキがでにくく安定するからです。今回のお題は奇遇にも「5体のペンギンちゃんを跳ばすこと」・・・もうこの形しかありません。
そこからは電光石火の勢いで5角形をした試作機ができあがりました。ですが5本の脚を完全に同じように縮めて、かつ同時に離すことが難しく、ジャンプすると機体が回転してしまいます。
これを解決する方法として、先に試作を進めていたワイヤーを巻き取ってバネを縮める方式がヒントになりました。5角形の中心に、モーター・電磁クラッチ・プーリーを縦方向に配列して、放射状に各脚へ伸ばしたワイヤーを同時に巻き取る方法です。これだと5本脚のタイミングは完全に同期できますし、メカの中で最も重たい部品を中心に配置できるので、ジャンプした際の姿勢も安定します。
これでいよいよ最終形の設計方針が決定です。全ての部品の重量を実測し、3D設計モデルに反映して最適な部品配置やバネの強さを検討しながら、本番機を製作しました。
構造の詳細は以下のスライドをご覧ください。
Pentagon-1記念すべきファーストジャンプの瞬間が以下の動画です。
そして、DVDチームも含めてみんなが集まって連続ジャンプを目撃した瞬間がこの動画。
期限が迫ってきてメンバー誰もがかなり焦りを感じている状況でしたが、このジャンプする姿を見て「いいじゃーん、これなら跳ばせるじゃーん」と一気に盛り上がりました。番組でも放映されたシーンです。この段階ではまだタイマーは取り付けておらず、人がスイッチを押して跳ぶタイミングを計っています。
床が平らでないこともありますが、跳んでいるとだんだんと移動してしまうので、重量バランスやワイヤーを巻き取るタイミングの調整を行いながらテストを重ね、タイマーを取り付けての連続ジャンプができるようになりました。
そして本番1週間前の現地リハーサル直前になって、ようやく縄回しの練習を開始。当初はスタートのタイミングを合わせるのが難しいのでは、と想定していましたが、ここは回し手の仲良しコンビが素晴らしい能力を発揮。少ない時間の中で集中して練習を重ね、その課題をクリアしてくれました。
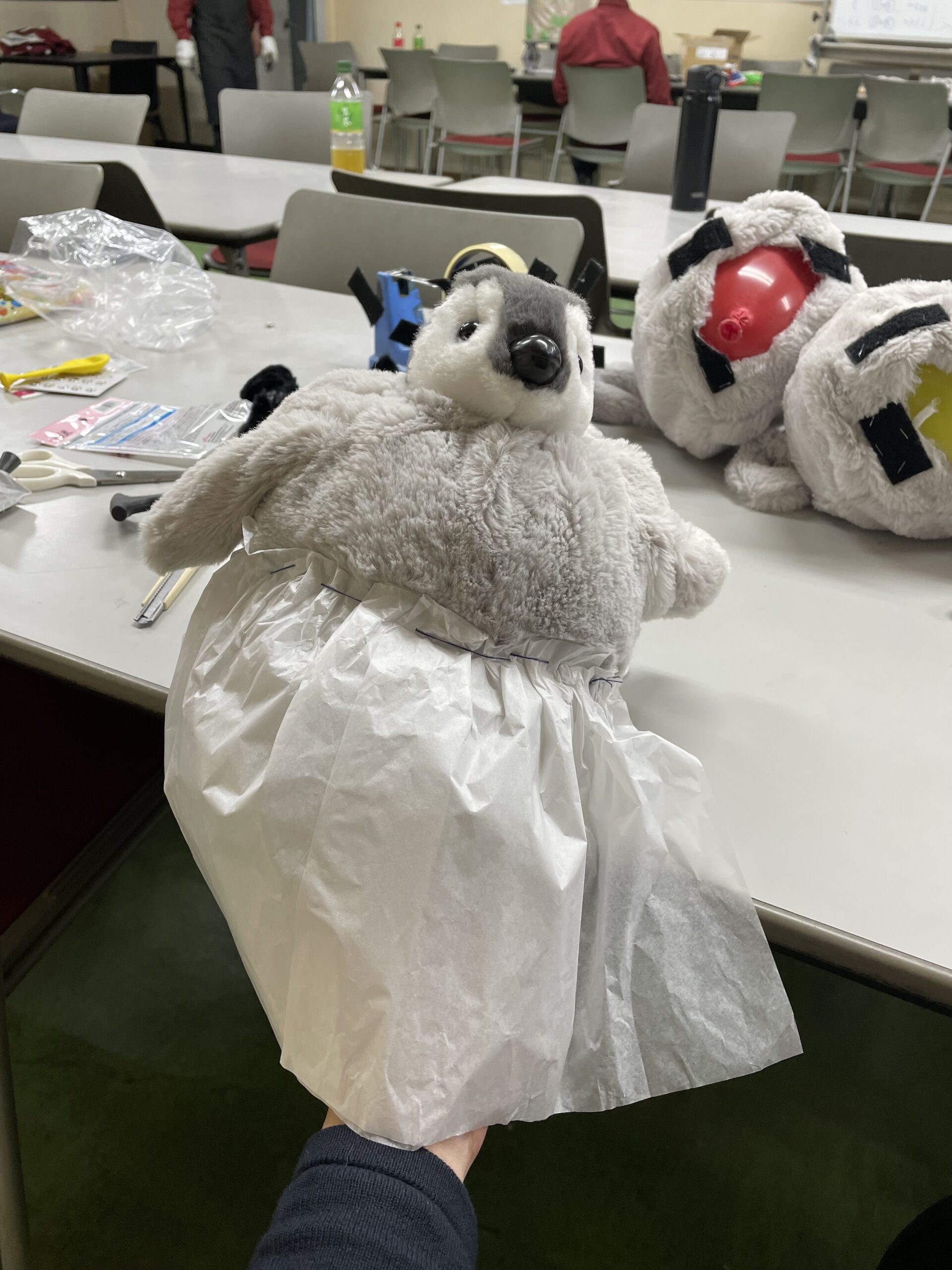
本番まで1週間を切ったところで、いよいよペンギンちゃんの身体の魔改造に取りかかります。衣装の製作を含め、ここは事務職の女性2人が担当。
・中身のメカメカした部分は見えないようにしたい
・5匹のペンギンちゃんがそれぞれの脚でしっかりジャンプしているように見せたい
・重たくなるとジャンプの高さが変わってしまうので、できる限り軽くしたい
・そして何よりも、かわいらしい姿に仕上げたい
これら多くの難しい要求を、素敵なアイディアで全て叶えてくれました。
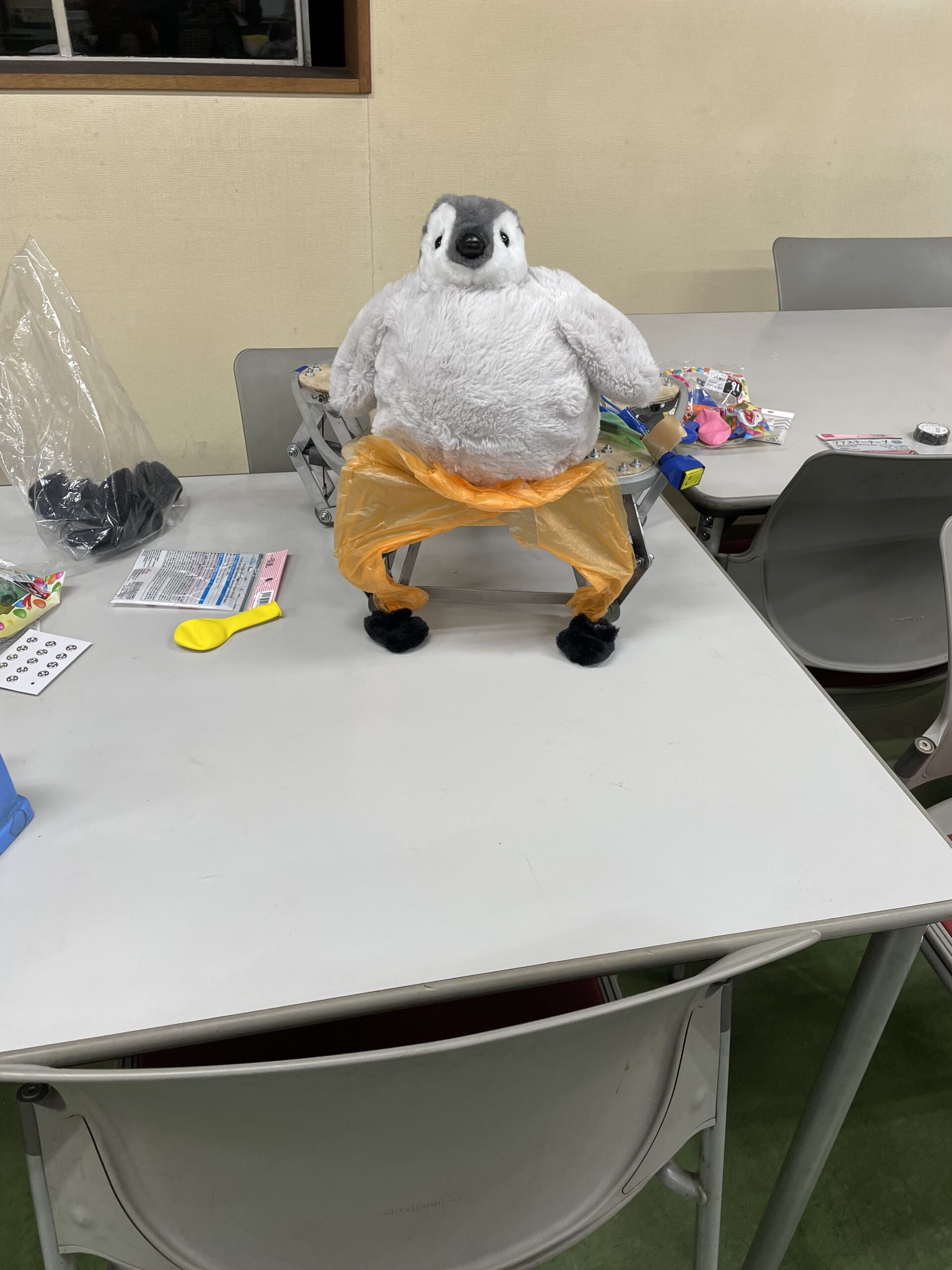
元々のペンギンちゃんの胴体だと小さくて中身のメカが見えてしまうので、実は胴体だけ違うぬいぐるみのものを流用しています。そして軽量化のために中身は風船に。数日でしぼんでしまわないように、風船には特殊なコーティングを施しました。そして、寒い中少し可哀そうでしたが、全身の羽毛まで刈り込んで、ポッコリおなかに反して限界までダイエット。
そして、大事なネーミングも決まりました。
5角形、ペンギンちゃんが5匹、かわいらしい姿 →→→ 「ペン太5ん」
もうこれしかないという感じですね、名付け親であるリーダーのセンスが秀逸です。「ペン」がカタカナ、「太」が漢字、「ん」がひらがな、というのも名付け親のこだわりです。


最終的な姿も出来上がって、ある程度の回数を連続して跳ばせるようになってきたものの、ひとつ気になることが残っていました。それは、この機体は構造上どんなに頑張っても1分間に70回程度しか跳ばせない、ということ。
目標の100回に及ばない。この回数ではあの2社には勝てないのではないか?
ここにたどり着くまでに相当な苦労があったので、跳ぶようになったことは非常に嬉しかったのですが、ただ「跳びました」だけではダメだ、やっぱりやるからには勝たないと。
そんな中、平行して改良を進めていた圧縮バネ方式の機体、実はこちらもかなり完成度が上がっていて、1分間に100回跳べる可能性が見えてきていました。
そこで、本番の2回あるチャンスのうち、まず1回目を「ペン太5ん」に、そこである程度の結果が出せたら、2回目はこちらの機体で勝負に出ようという作戦が立てられました。
そしてこちらの機体のネーミング、もはやメカを隠すことができないので、潔く「メカペンギン」に、(見たまんまのひねりゼロです、、、)
メカペンギンの構造は以下のスライドをご覧ください。
MechaPenguin本番を直前にむかえ、両機体で縄回しの練習を繰り返していたところ、出荷前日になって悲劇が起きました。なんと、連日繰り返される練習の無理がたたって、「メカペンギン」の脚が疲労骨折してしまったのです。
特急で治療することも検討しましたが、完全に回復するには時間が足りず、非常に無念ですが「メカペンギン」の出場はここで見送ることになってしまいました。
そうなると「ペン太5ん」で最高のパフォーマンスを発揮しなければなりません。
縄回しコンビは出荷前日の深夜まで一生懸命に「ペン太5ん」と息を合わせる練習を繰り返し、職人芸とまでいえる縄回し術を身につけて、
緊張の本番で最高の結果を叩き出すことになります。